擊這里在線咨詢(xún)客服")
最近兩年,自動(dòng)駕駛儼然已經(jīng)成為一個(gè)大眾話題,但很多問(wèn)題的討論仍然聚焦在表面。
比如,對(duì)于自動(dòng)駕駛的討論更多還是集中在感知領(lǐng)域,涉及到要用多大算力的芯片、要不要上激光雷達(dá),上幾顆等爭(zhēng)論,看不看得懂,看不看得清的問(wèn)題。
但其實(shí)隨著智能駕駛產(chǎn)品(主要是輔助駕駛產(chǎn)品)的規(guī)模量產(chǎn),越來(lái)越多的普通用戶(hù)其實(shí)已經(jīng)能夠體驗(yàn)到自動(dòng)駕駛到底是司機(jī)的福音,還是帶來(lái)更多駕駛難題?
當(dāng)智能駕駛開(kāi)始交付給普通用戶(hù)的時(shí)候,作為乘用車(chē)的基礎(chǔ)功能,除了感知智能識(shí)別的準(zhǔn)確性外,決策和控制的安全性、穩(wěn)定性和舒適性也同樣重要。

盡管說(shuō)市面上很多車(chē)企都推出了被稱(chēng)為L(zhǎng)2級(jí)的輔助駕駛產(chǎn)品,但實(shí)際上,性能和體驗(yàn)差別極大。主要的差別,一方面在于硬件方面的傳感器精度、范圍,以及算力的上限,所決定的能夠識(shí)別環(huán)境、場(chǎng)景的廣度和范圍,另一個(gè)就是車(chē)輛對(duì)這些感知的判斷和決策。
這也成為很多車(chē)主日常吐槽輔助駕駛不夠聰明,也不夠省心,更不夠舒適的地方。
比如這種“自主了但又沒(méi)自主”問(wèn)題,有些帶有高速域輔助駕駛功能車(chē)輛開(kāi)啟了自主變道超車(chē)功能,但在高速遇到稍微車(chē)多的情況,車(chē)輛就遲遲完成不了變道指令,讓變道變了一個(gè)寂寞。
又比如,“新手剎車(chē)”問(wèn)題,有些輔助駕駛系統(tǒng)就像剛上路的新手一樣,很難把握剎車(chē)的輕重,一些明明可以勻速減速的場(chǎng)景,車(chē)輛卻總會(huì)拖到最后一刻才急剎。
實(shí)際來(lái)說(shuō),當(dāng)下這些自動(dòng)駕駛或者說(shuō)輔助駕駛產(chǎn)品,其決策系統(tǒng)更多依靠執(zhí)行既定駕駛策略和規(guī)則,而不是采用人類(lèi)的泛化學(xué)習(xí)。
當(dāng)人類(lèi)新手有了半年時(shí)間或者幾千公里的開(kāi)車(chē)實(shí)踐,基本就可以做到非常絲滑的駕駛,那么,對(duì)于自動(dòng)駕駛來(lái)說(shuō),是不是有真正能解決認(rèn)知決策痛點(diǎn)的“第一性原理”呢?
接下來(lái),我們透過(guò)中美兩家極具代表性的自動(dòng)駕駛技術(shù)玩家特斯拉和毫末![]() 智行(參數(shù)|圖片),看下自
智行(參數(shù)|圖片),看下自
動(dòng)駕駛究竟要怎樣才能做到更有“人性的智慧和溫度”?
復(fù)刻“老司機(jī)”邏輯:特斯拉自動(dòng)駕駛的“自我學(xué)習(xí)”
日本作家夏目漱石在他的長(zhǎng)篇小說(shuō)《貓》中,曾借貓咪之口這樣講到,“人類(lèi)所有的研究,都是為了研究自己”,其實(shí)自動(dòng)駕駛又何嘗不是對(duì)人工駕駛的學(xué)習(xí)呢。
在自動(dòng)駕駛領(lǐng)域中,馬斯克可以說(shuō)是第一個(gè)“明牌”這一想法的人,而他的這一邏輯則是源于對(duì)第一性原理的思考。
基于第一性原理,我們也可以對(duì)人工駕駛再做一次復(fù)盤(pán):想象一下,在擁堵的城市中跟車(chē)時(shí),在紅綠燈路口與對(duì)向車(chē)流博弈時(shí),我們是怎么做的?
美國(guó)科學(xué)院院士丹尼爾·卡尼曼在其書(shū)籍《思考,快與慢》中,將人類(lèi)的思維分為了本能反應(yīng)與深度思考。我們之所以能高效舒適地完成復(fù)雜場(chǎng)景下的駕駛,靠的便是通過(guò)不斷學(xué)習(xí)實(shí)現(xiàn)這二者的融合,這也是人能否從新手蛻變至老司機(jī)的關(guān)鍵。
對(duì)于自動(dòng)駕駛而言,當(dāng)前現(xiàn)狀再清晰不過(guò)了。由于大量手寫(xiě)規(guī)則的采用,自動(dòng)駕駛實(shí)際并不具備深度思考的前提條件,僅能依靠本能反應(yīng)決策;想讓自動(dòng)駕駛媲美人工駕駛,首先要賦予其深度思考的能力,其次則是實(shí)現(xiàn)其與本能反應(yīng)的融合。
想清楚了這一點(diǎn),自動(dòng)駕駛至少有方向可循了,但方向只是第一步,想要讓自動(dòng)駕駛更像人,還需要有好的方法。
關(guān)于這一點(diǎn),早早實(shí)現(xiàn)高速域與城市域輔助駕駛的特斯拉已經(jīng)給我們打好了樣板。按照駕駛場(chǎng)景,特斯拉首先會(huì)進(jìn)行辨別,哪一種是相對(duì)簡(jiǎn)單的,哪一種是更復(fù)雜的,由此將規(guī)劃&控制分為兩線,給予不同的邏輯。
以大型商超的停車(chē)場(chǎng)為例。工作日的商超停車(chē)場(chǎng)車(chē)流量稀少,能夠給到駕駛者很高的自由度,算是簡(jiǎn)單的場(chǎng)景;而節(jié)假日的商場(chǎng)停車(chē)場(chǎng)則完全相反,大量的車(chē)流、擁擠的車(chē)道、搶手的車(chē)位,以及隱藏在視野盲區(qū)下胡亂奔跑的小孩,這種環(huán)境非常考驗(yàn)駕駛者與其它交通參與者的博弈心理與駕駛能力,是非常復(fù)雜的場(chǎng)景。
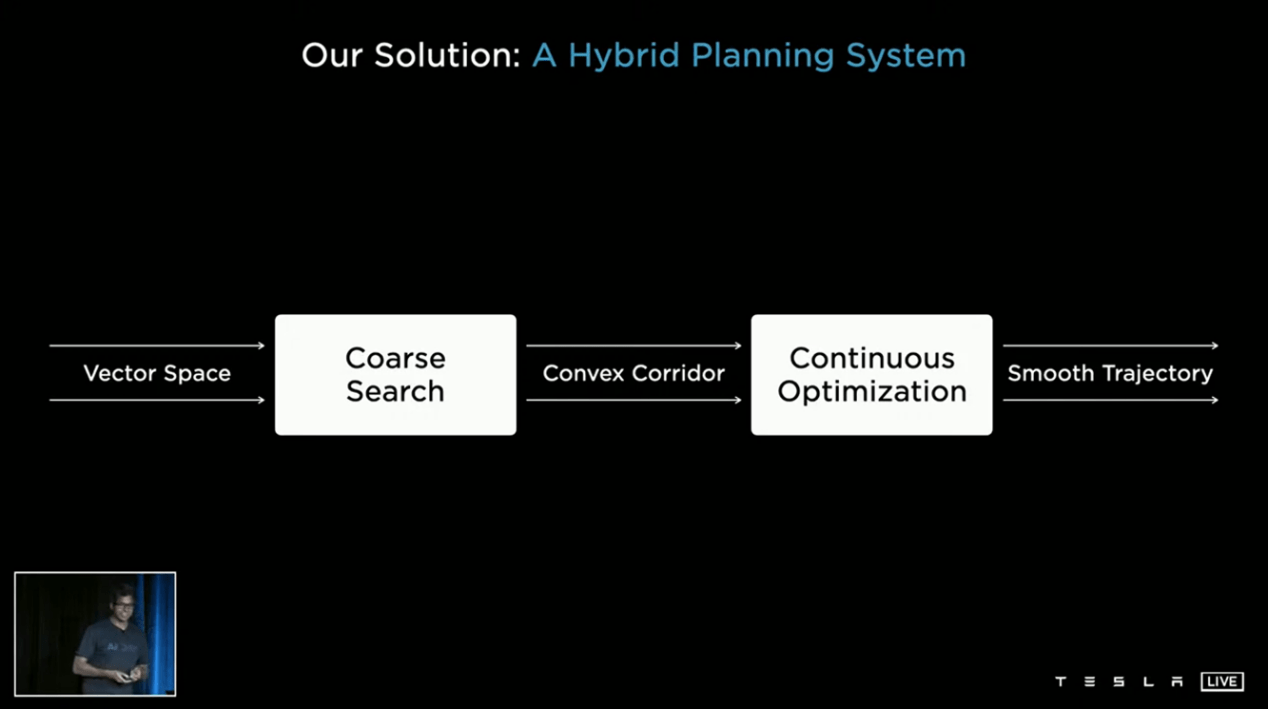
那么特斯拉是如何應(yīng)對(duì)這兩種場(chǎng)景的?在一些相對(duì)簡(jiǎn)單的場(chǎng)景中,特斯拉會(huì)根據(jù)感知繪制的3D向量空間的基礎(chǔ)上,加入一條粗估的行進(jìn)路徑,再加入安全性、舒適性等指標(biāo)進(jìn)行優(yōu)化,得出一條具備多種參數(shù)的時(shí)空軌跡。
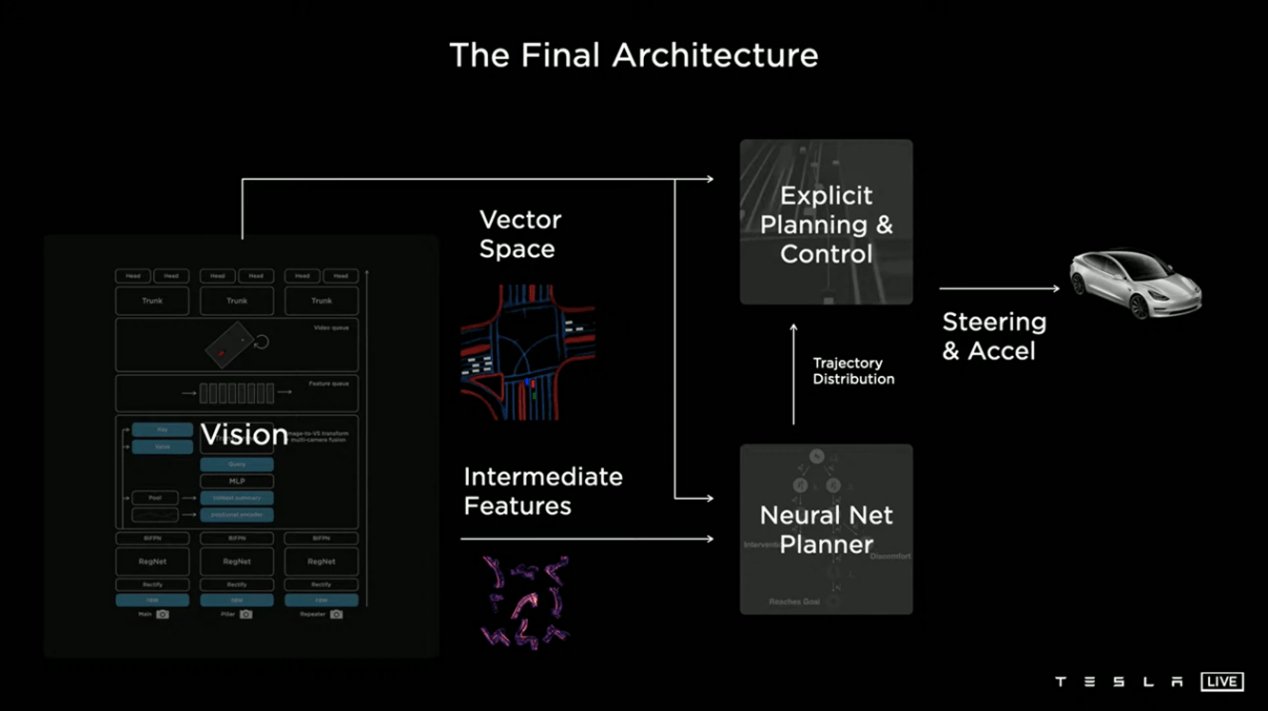
而面對(duì)復(fù)雜場(chǎng)景,特斯拉借助Transformer大模型全局注意力機(jī)制的特點(diǎn),并以車(chē)主數(shù)據(jù)為基礎(chǔ)訓(xùn)練一套算法模型,由此讓AI決策與人腦的想法更接近,并提高實(shí)時(shí)性。
此外,在與其他車(chē)輛、人等交通參與者遭遇時(shí),特斯拉會(huì)對(duì)其他交通參與者的狀態(tài)參數(shù)收集,并得出其路徑,由此再調(diào)整自己的軌跡與規(guī)劃。這一特征將是實(shí)時(shí)的,以確保特斯拉能夠針對(duì)環(huán)境的改變快速做出反應(yīng)。
總結(jié)來(lái)看,特斯拉的自動(dòng)駕駛復(fù)刻了人工駕駛的思維邏輯,而這些思維邏輯換算到自動(dòng)駕駛的語(yǔ)言,便是數(shù)據(jù)、算力、算法。
數(shù)據(jù)是自動(dòng)駕駛的基石,就像書(shū)本中的文字一樣,想要讀懂書(shū)籍,就必須先學(xué)會(huì)識(shí)字,而算法便是書(shū)籍,其將零散而無(wú)意義的文字組合,提供自動(dòng)駕駛需求的知識(shí);算力的理解就很簡(jiǎn)單了,有一顆聰明的大腦,自動(dòng)駕駛才能將看到的知識(shí)真正學(xué)會(huì)。
當(dāng)然,特斯拉的自動(dòng)駕駛技術(shù)在當(dāng)下也算不上足夠“聰明”,但其自動(dòng)駕駛與第一性原理融會(huì)貫通、并將其成功運(yùn)用于規(guī)劃與控制環(huán)節(jié)中,卻依舊是領(lǐng)先的。
換句話說(shuō),特斯拉確實(shí)走在了自動(dòng)駕駛的前列,而在其余自動(dòng)駕駛企業(yè)中,誰(shuí)能率先領(lǐng)悟到這一點(diǎn)、并率先實(shí)現(xiàn)落地,誰(shuí)的自動(dòng)駕駛技術(shù)與產(chǎn)品就能獲得更多用戶(hù)、乃至整個(gè)市場(chǎng)的青睞。
從怎么學(xué)到學(xué)什么:毫末讓自動(dòng)駕駛更有“人性溫度”
如今縱觀整個(gè)行業(yè),以數(shù)據(jù)為基石的自動(dòng)駕駛企業(yè)并不多,而除特斯拉外,毫末智行絕對(duì)是最吸引人的那一家。
毫末智行為自家的數(shù)據(jù)智能體系命名為MANA,其具備感知智能、認(rèn)知智能、標(biāo)注、驗(yàn)證與計(jì)算五大能力。MANA在2021年底被毫末智行正式提出,并在4個(gè)月后宣布實(shí)現(xiàn)了感知智能、認(rèn)知智能、成本&速度三大領(lǐng)域的進(jìn)化。

在這之中,認(rèn)知智能就是毫末用以幫助自動(dòng)駕駛技術(shù)實(shí)現(xiàn)更人性化、更有溫度的方法。
在毫末智行看來(lái),認(rèn)知智能很難被量化、規(guī)則化,因?yàn)闋砍兜胶芏嘧兞浚绻凑找酝氖謱?xiě)規(guī)則,必然會(huì)因?yàn)橐?guī)則量的暴漲導(dǎo)致整個(gè)自動(dòng)駕駛崩潰。
同樣,自動(dòng)駕駛作為人工智能的一大分支,其核心應(yīng)當(dāng)是智能,而規(guī)則只是機(jī)械的命令執(zhí)行。所以認(rèn)知智能的目標(biāo),就是替代手寫(xiě)規(guī)則,讓自動(dòng)駕駛更像人。
基于此,毫末智行為感知智能設(shè)定了三大要素,分別是安全、高效與舒適。安全是自動(dòng)駕駛的前提,而高效與舒適則需要從數(shù)據(jù)中學(xué)習(xí),其他交通參與者行為的理解和超時(shí)空的歷史經(jīng)驗(yàn)。
概念說(shuō)太多容易眼高手低,所以對(duì)于如何讓自動(dòng)駕駛更像人,毫末提出了讓自己的自動(dòng)駕駛學(xué)徒畢業(yè)的“兩步走”策略:第一步是讓自動(dòng)駕駛懂得“怎么學(xué)”,第二步是讓自動(dòng)駕駛知道“學(xué)什么”。
對(duì)于“怎么學(xué)”,毫末智行的想法是,借助Transformer大模型及其全局注意力機(jī)制的特點(diǎn)進(jìn)行預(yù)訓(xùn)練,為自動(dòng)駕駛不同的算法模塊設(shè)計(jì)算法模型。
這樣做的好處是,經(jīng)過(guò)統(tǒng)一大模型預(yù)訓(xùn)練得到的模型具有更高的泛用性,各模型之間可以快速建立聯(lián)系,提升整個(gè)自動(dòng)駕駛系統(tǒng)的工作效率;另外具備全局注意力機(jī)制的模型也具備更強(qiáng)的魯棒性,在面對(duì)復(fù)雜場(chǎng)景時(shí),更能高效消化海量數(shù)據(jù)、輸出更準(zhǔn)確的決策。
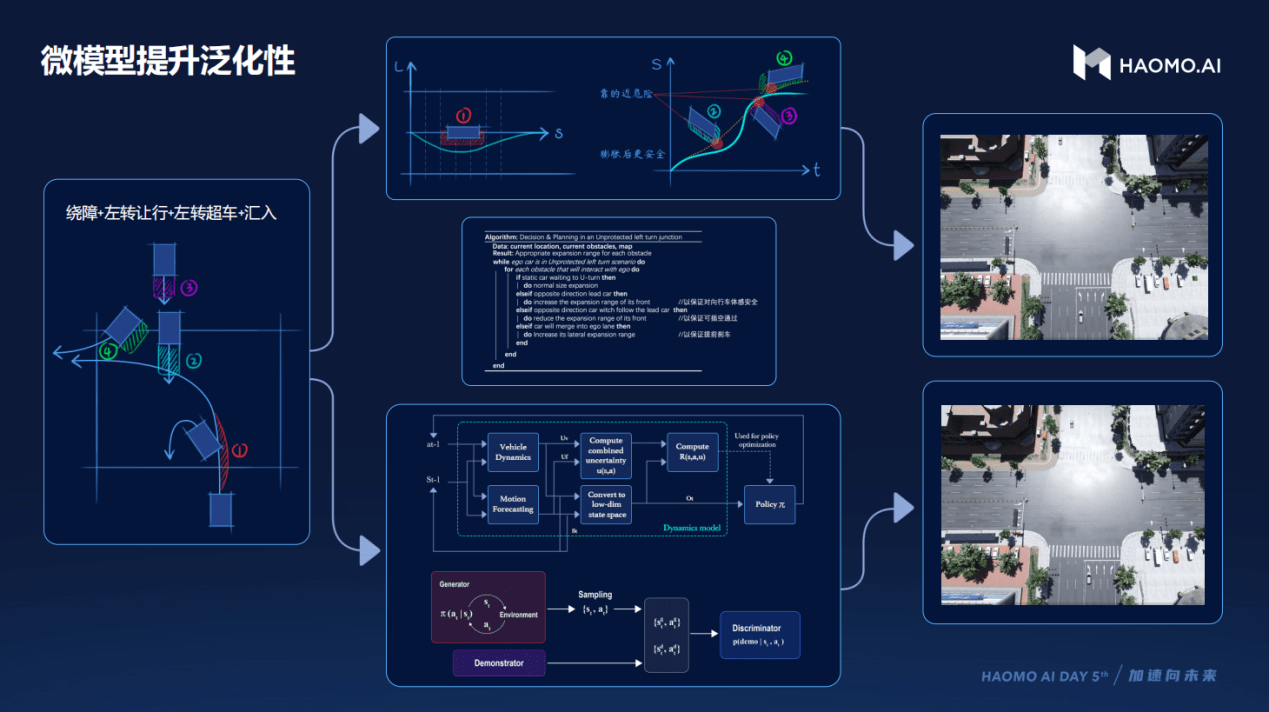
對(duì)于這一功能的優(yōu)勢(shì),最好的演繹莫過(guò)于經(jīng)典的紅綠燈場(chǎng)景。想象一下,如果此時(shí)的你是左轉(zhuǎn)道的頭車(chē),而在綠燈后,你將如何穿過(guò)對(duì)向的直行車(chē)流,完成左轉(zhuǎn)?
按照傳統(tǒng)輔助駕駛產(chǎn)品的邏輯,此時(shí)必定是以保證安全+遵守法規(guī)為前提的,然而現(xiàn)實(shí)情況是,如果你完全遵循這一前提,你是根本無(wú)法在綠燈內(nèi)實(shí)現(xiàn)左轉(zhuǎn)的,而后車(chē)也會(huì)因你影響通行效率,夸張點(diǎn)引起怒路癥都不為過(guò)。
人是會(huì)審時(shí)度勢(shì)進(jìn)行變通的,但手寫(xiě)規(guī)則不會(huì)。所以毫末智行的做法便是,以車(chē)主在這一場(chǎng)景下的行為動(dòng)作進(jìn)行解析,由此解出為一套完整的思維邏輯。
而全局注意力機(jī)制的優(yōu)勢(shì)則體現(xiàn)在,駕駛者在與臨近的對(duì)向車(chē)輛進(jìn)行博弈時(shí),還會(huì)將附近的交通參與者加入進(jìn)來(lái),做到“抬起頭走路”;而缺少全局注意力機(jī)制帶來(lái)的結(jié)果就會(huì)像“低著頭走路”,出門(mén)只能中午走,因?yàn)樵缤硪矇Α?/p>
毫末智行將認(rèn)知智能“怎么學(xué)”模塊命名為T(mén)arsGo模塊。TarsGo會(huì)以數(shù)據(jù)驅(qū)動(dòng),并以模型的形式訓(xùn)練算法,由此實(shí)現(xiàn)對(duì)人腦思維邏輯與學(xué)習(xí)的模擬,實(shí)現(xiàn)最終對(duì)手寫(xiě)規(guī)則的替代。
解決了“怎么學(xué)”,下一個(gè)問(wèn)題就是“學(xué)什么”。同樣在紅綠燈左轉(zhuǎn)的場(chǎng)景中,有的車(chē)主會(huì)以非常暴力、或者過(guò)于激進(jìn)冒險(xiǎn)的方式通過(guò),極容易引發(fā)事故或擁堵。而這種駕駛數(shù)據(jù)和策略,對(duì)于自動(dòng)駕駛來(lái)說(shuō),顯然是不值得學(xué)習(xí)的數(shù)據(jù)。毫末會(huì)將人類(lèi)駕駛中那些更穩(wěn)妥安全駕駛策略的數(shù)據(jù)進(jìn)行篩選,作為機(jī)器學(xué)習(xí)模型用來(lái)學(xué)習(xí)的樣本,從而訓(xùn)練出更安全、更符合交通規(guī)則,也更具人性化的駕駛策略。
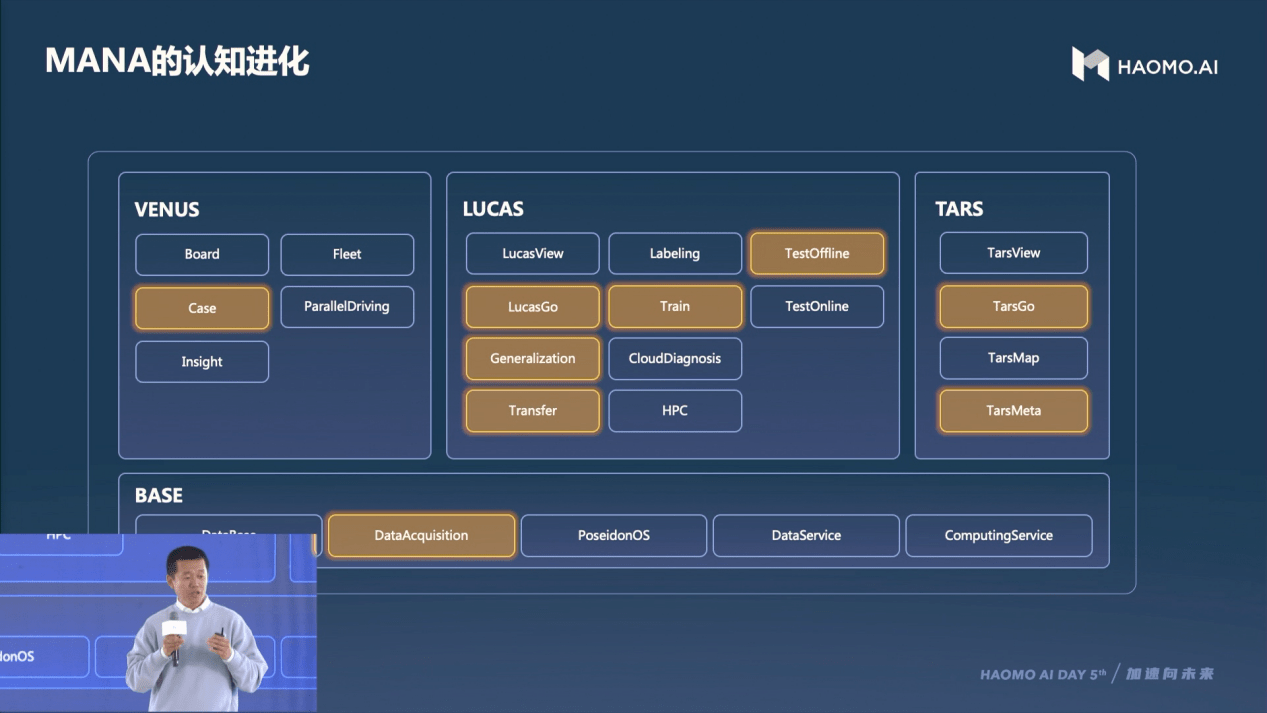
對(duì)此,毫末智行的解法則是引入大模型訓(xùn)練。通過(guò)大模型的引入并預(yù)訓(xùn)練,毫末智行為L(zhǎng)ucasGo模塊建立了能夠篩選優(yōu)質(zhì)數(shù)據(jù)的算法模型,這也使得認(rèn)知智能中數(shù)據(jù)、算力、算法能夠形成良性閉環(huán)循環(huán)。以大算力平臺(tái)為支撐,海量標(biāo)注的優(yōu)質(zhì)數(shù)據(jù)將推動(dòng)算法日漸成熟,自動(dòng)駕駛也將由此變得更具人性,更有智慧和溫度。
自動(dòng)駕駛,開(kāi)始于自主認(rèn)知決策之后
總而言之,對(duì)于自動(dòng)駕駛而言,想要變得比人類(lèi)駕駛更加安全、舒適、高效,核心還是要讓其擁有自主決策的能力,將長(zhǎng)期訓(xùn)練中獲得的開(kāi)車(chē)的經(jīng)驗(yàn)變成不斷累積的智慧。
從人類(lèi)智能的角度來(lái)說(shuō),真正掌握知識(shí)的標(biāo)準(zhǔn)不是機(jī)械地記憶和重復(fù)背誦,而是可以靈活應(yīng)用到解決實(shí)際的問(wèn)題過(guò)程中。因此,對(duì)于自動(dòng)駕駛,僅僅依靠人類(lèi)制定的開(kāi)車(chē)規(guī)則是不可能學(xué)會(huì)開(kāi)車(chē),靠自身算法訓(xùn)練建立起來(lái)的認(rèn)知決策模型才更具生命力。
不論是特斯拉的規(guī)劃&控制方案,還是毫末智行數(shù)據(jù)體系MANA的認(rèn)知智能能力,盡管二者在技術(shù)路線等方面存在許多不同,但其在認(rèn)知領(lǐng)域的內(nèi)核都是相通的,即通過(guò)對(duì)第一性原理的思考,讓自動(dòng)駕駛以人工智能自主學(xué)習(xí)的形式實(shí)現(xiàn)迭代升級(jí)。
在認(rèn)知決策上引入AI的大規(guī)模訓(xùn)練,這讓特斯拉與毫末智行在自動(dòng)駕駛技術(shù)的進(jìn)化上領(lǐng)先了一大步。讓汽車(chē)模仿人類(lèi)開(kāi)車(chē),變成讓汽車(chē)像人類(lèi)一樣學(xué)會(huì)開(kāi)車(chē),這是自動(dòng)駕駛行業(yè)接下來(lái)更為重要的一項(xiàng)任務(wù)。





